






















 |
4 ध्रुव BLDC प्लैनेटरी ब्रशलेस डीसी गियर मोटर फर्नीचर / चिकित्सा / उद्योग के लिए
उत्पाद विवरण:
| उत्पत्ति के प्लेस: | डोंगगुआन चीन |
| ब्रांड नाम: | UCHI |
| प्रमाणन: | Completed |
| मॉडल संख्या: | 42JXE100K/B4260 |
भुगतान & नौवहन नियमों:
| न्यूनतम आदेश मात्रा: | 1000 पीसी |
|---|---|
| मूल्य: | विनिमय योग्य |
| पैकेजिंग विवरण: | मानक |
| प्रसव के समय: | 5-7 दिन |
| भुगतान शर्तें: | टी/टी, वेस्टर्न यूनियन |
| आपूर्ति की क्षमता: | 5000 पीस स्टॉक |
|
विस्तार जानकारी |
|||
| खम्भों की संख्या: | 4 | परिचयाीलन की रेंज: | 9V~16V |
|---|---|---|---|
| टॉर्क जी.सी.एम: | 370 | एप्लिकेशन की सीमा: | फर्नीचर/चिकित्सा/उद्योग |
| प्रमाणपत्र: | -3 सी | नो-लोड गति आर/मिनट: | 6000 |
| नो-लोड करंट एमए: | 680 | रेटेड गति आर/मिनट: | 5000 |
| रेटेड शक्ति W: | 19.0 | चरण की संख्या: | 3 |
| प्रमुखता देना: | फर्नीचर ब्रशलेस डीसी गियर मोटर,मेडिकल ब्रशलेस डीसी गियर मोटर,उद्योग डीसी ग्रह गियर मोटर |
||
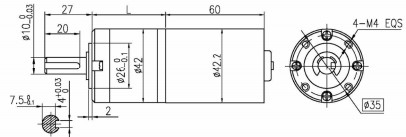
उत्पाद विवरण
अनुमेय भार सीमाः 1N.m~10N.m
![]()
ब्रशलेस मोटर के तकनीकी डेटा
| प्रकार | संख्या ध्रुवों के |
संख्या चरण का |
परिचालन रेंज |
रेटेड वोल्टेज वीडीसी |
कोई भार नहीं गति r/min |
कोई भार नहीं वर्तमान mA |
रेटेड मोर्टार जी.सी.एम. |
रेटेड गति r/min |
रेटेड वर्तमान ए |
रेटेड शक्ति W |
||||||||||||||||
| B4260-1260 | 4 | 3 | 9V ~ 16V | 12 | 6000 | 680 | 370 | 5000 | 2.8 | 19.0 | ||||||||||||||||
| B4260-2460 | 4 | 3 | 9V~26V | 24 | 6000 | 350 | 370 | 5300 | 1.4 | 20.1 | ||||||||||||||||
ब्रशलेस गियर मोटर के तकनीकी डेटा
1.B4260-1260 BLDC मोटर
| कमी अनुपात | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| गियर ट्रेनों की संख्या | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| लंबाई ((L) | मिमी | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| लोड रहित गति | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| नामित गति | r/min | 1348 | 965 | 357 | 263 | 185 | 98 | 70 | 50 | 36 | 28 | 23 | 20 | 16 | 14 | 12 | 10 | |||||||||
| नामित टोक़ | एन.एम. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| कम समय में अधिकतम अनुमेय भार | एन.एम. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
2B4260-2460 बीएलडीसी मोटर
| कमी अनुपात | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| गियर ट्रेनों की संख्या | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| लंबाई ((L) | मिमी | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| लोड रहित गति | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| नामित गति | r/min | 1429 | 1023 | 379 | 279 | 196 | 104 | 75 | 53 | 38 | 29 | 24 | 21 | 17 | 15 | 12 | 11 | |||||||||
| नामित टोक़ | एन.एम. | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| कम समय में अधिकतम अनुमेय भार | एन.एम. | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
तार आरेख
![]()
पिन 1# फीडबैक n=60 * F/P, जहां F फीडबैक आउटपुट आवृत्ति का प्रतिनिधित्व करता है और P मोटर पोल जोड़े के 4 जोड़े का प्रतिनिधित्व करता है।
पिन 2# ब्रेक नियंत्रण
पिन 3 # पीडब्ल्यूएम गति विनियमन, इनपुट 20~30kHz पीडब्ल्यूएम संकेत, और कार्य चक्र को समायोजित करके मोटर गति को समायोजित करें।
पिन 4# आगे और पीछे घूर्णन, निलंबित घूर्णन CW है, और ग्राउंड घूर्णन के लिए शॉर्ट सर्किट CCW है।
पिन 5# पावर सप्लाई का नकारात्मक ध्रुव
मोटर के सकारात्मक ध्रुव (नीली रेखा) बिजली की आपूर्ति के सकारात्मक ध्रुव से जुड़ा है, और मोटर के नकारात्मक ध्रुव (हरी रेखा) बिजली की आपूर्ति के नकारात्मक ध्रुव से जुड़ा है.PIN3# और PIN5# एक दूसरे से जुड़े हुए हैं, और मोटर पूर्ण गति से चलता है।
एक ही आवश्यकता के अनुसार, आगे और पीछे स्विच के दौरान, पिन 3 #, पिन 4 #, और पिन 5 # एक साथ जुड़ा होना चाहिए
![]()
पिन 3 # पीडब्ल्यूएम गति विनियमन, इनपुट 20~30kHz पीडब्ल्यूएम संकेत, और कार्य चक्र को समायोजित करके मोटर गति को समायोजित करें।
पिन 4#आगे और पीछे घूर्णन, निलंबित घूर्णन CW है, और ग्राउंड घूर्णन के लिए शॉर्ट सर्किट CCW है।
पिन 5#बिजली की आपूर्ति का नकारात्मक ध्रुव